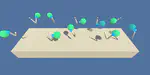
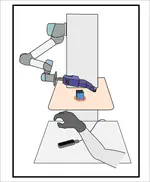
Dataset containing the demonstration data collected with a teleoperation system. The CRISP teleoperated fruit picking dataset contains real-world teleoperated demonstration recordings of teleoperated grasping and manipulation sequences. The dataset offers recordings of RGB-D, Tactile and kinematic data collected during fruit pick-and-place tasks. Our items are placed in the workspace as single or as a clutter to simulate real-world food manufacturing scenarios.