Claudio Coppola
Claudio Coppola
Home
Posts
Projects
Talks
Publications
Contact
Light
Dark
Automatic
2
The CORSMAL benchmark for the prediction of the properties of containers
Alessio Xompero
,
Santiago Donaher
,
Vladimir Iashin
,
Francesca Palermo
,
Gökhan Solak
,
Claudio Coppola
,
Reina Ishikawa
,
Yuichi Nagao
,
Ryo Hachiuma
,
Qi Liu
,
others
Cite
Grasp stability prediction for a dexterous robotic hand combining depth vision and haptic bayesian exploration
The paper presents an approach using depth sensing and tactile feedback to predict safe robotic grasps of completely unknown objects through haptic exploration and comparing grid search, standard Bayesian Optimization, and unscented Bayesian Optimization, with results showing unscented Bayesian Optimization provides higher confidence grasps with fewer exploratory observations.
Muhammad Sami Siddiqui
,
Claudio Coppola
,
Gökhan Solak
,
Lorenzo Jamone
PDF
Cite
Code
Video
Multi-modal estimation of the properties of containers and their content: survey and evaluation
Alessio Xompero
,
Santiago Donaher
,
Vladimir Iashin
,
Francesca Palermo
,
Gökhan Solak
,
Claudio Coppola
,
Reina Ishikawa
,
Yuichi Nagao
,
Ryo Hachiuma
,
Qi Liu
,
others
Cite
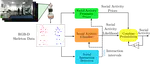
Social activity recognition on continuous RGB-D video sequences
Modern service robots are provided with one or more sensors, often including RGB-D cameras, to perceive objects and humans in the …
Claudio Coppola
,
Serhan Cosar
,
Diego R Faria
,
Nicola Bellotto
PDF
Cite
Code
Dataset
Video
PhD Thesis - Social Activity Recognition for Service Robots using a Depth Camera
Claudio Coppola
,
Nicola Bellotto
Cite
Cite
×