Abstract
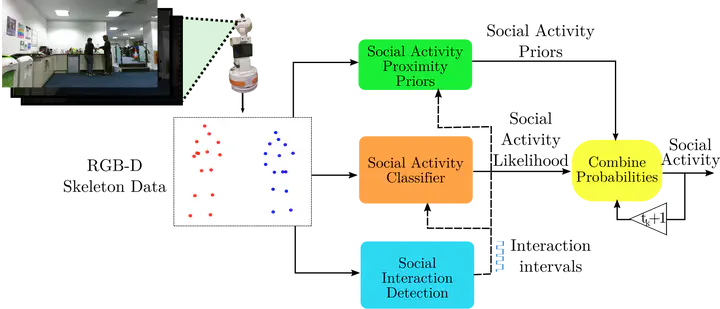
Modern service robots are provided with one or more sensors, often including RGB-D cameras, to perceive objects and humans in the environment. This paper proposes a new system for the recognition of human social activities from a continuous stream of RGB-D data. Many of the works until now have succeeded in recognising activities from clipped videos in datasets, but for robotic applications it is important to be able to move to more realistic scenarios in which such activities are not manually selected. For this reason, it is useful to detect the time intervals when humans are performing social activities, the recognition of which can contribute to trigger human-robot interactions or to detect situations of potential danger. The main contributions of this research work include a novel system for the recognition of social activities from continuous RGB-D data, combining temporal segmentation and classification, as well as a model for learning the proximity-based priors of the social activities. A new public dataset with RGB-D videos of social and individual activities is also provided and used for evaluating the proposed solutions. The results show the good performance of the system in recognising social activities from continuous RGB-D data.