Claudio Coppola
Claudio Coppola
Home
Posts
Projects
Talks
Publications
Contact
Light
Dark
Automatic
robotics
CRISP Teleoperated Fruit Picking Dataset
Dataset containing the demonstration data collected with a teleoperation system. The CRISP teleoperated fruit picking dataset contains real-world teleoperated demonstration recordings of teleoperated grasping and manipulation sequences. The dataset offers recordings of RGB-D, Tactile and kinematic data collected during fruit pick-and-place tasks. Our items are placed in the workspace as single or as a clutter to simulate real-world food manufacturing scenarios.
PDF
Video
Dataset
Follow
Connect
Teleoperation of dexterous robotic hands using Leap Motion and vibrotactile feedback.
Teleoperation system for arm-hand dexterous manipulator
PDF
Code
Video
Follow
Connect
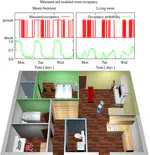
Learning temporal context for activity recognition
We investigate how incremental learning of long-term human activity patterns improves the accuracy of activity classification over …
Claudio Coppola
,
Tomas Krajnik
,
Tom Duckett
,
Nicola Bellotto
PDF
Cite
Code
Social activity recognition based on probabilistic merging of skeleton features with proximity priors from RGB-D data
The paper presents a probabilistic approach using spatio-temporal and social features to recognize human-human interaction activities, learns priors based on proxemics theory to improve classification, and provides a new public RGB-D dataset of social activities including risk situations, with results showing the proposed method merging different features and proximity priors improves precision, recall and accuracy over alternative approaches
Claudio Coppola
,
Diego R Faria
,
Urbano Nunes
,
Nicola Bellotto
PDF
Cite
Code
Dataset
Video
Cite
×